, Hisayoshi Muramatsu
概要
本研究紹介は村松が提案した周期/非周期分離フィルタについて解説する.特に,1次周期/非周期分離フィルタにおける大枠の理解・設計・実装を助けることを目的とし,より詳細に興味がある場合は参考文献[1-3]に記載する論文を読んでいただきたい.日本語文献として解説記事[4]があるが,詳細については論文を読んでいただきたい.
周期信号と非周期信号
工場において繰り返し作業する産業機械,大量生産される製品,人間の24時間サイクルによる生活,地球の自転と公転,スポーツやリハビリにおける繰り返し練習,歩行動作,など,我々の身の回りにはあらゆる周期性を含む現象が存在する. また,周期的でない信号,非周期信号もまた我々の身の回りに,破壊,異常,事故,ゆらぎ,転倒として存在している. これら現象をセンサにより計測することで得られる信号$x$は
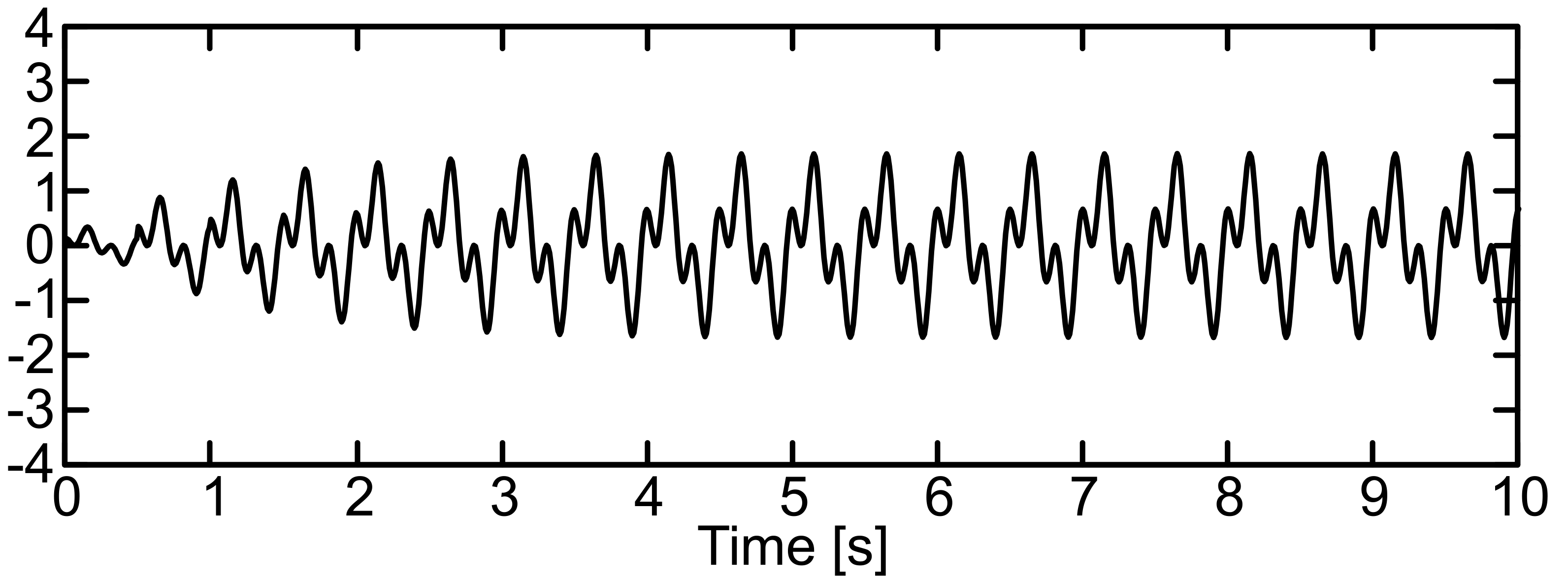
を満たすとき周期信号と呼ばれる.図1に周期$0.5\ \mathrm{s}$周波数$2\ \mathrm{Hz}$の周期信号例を示す.
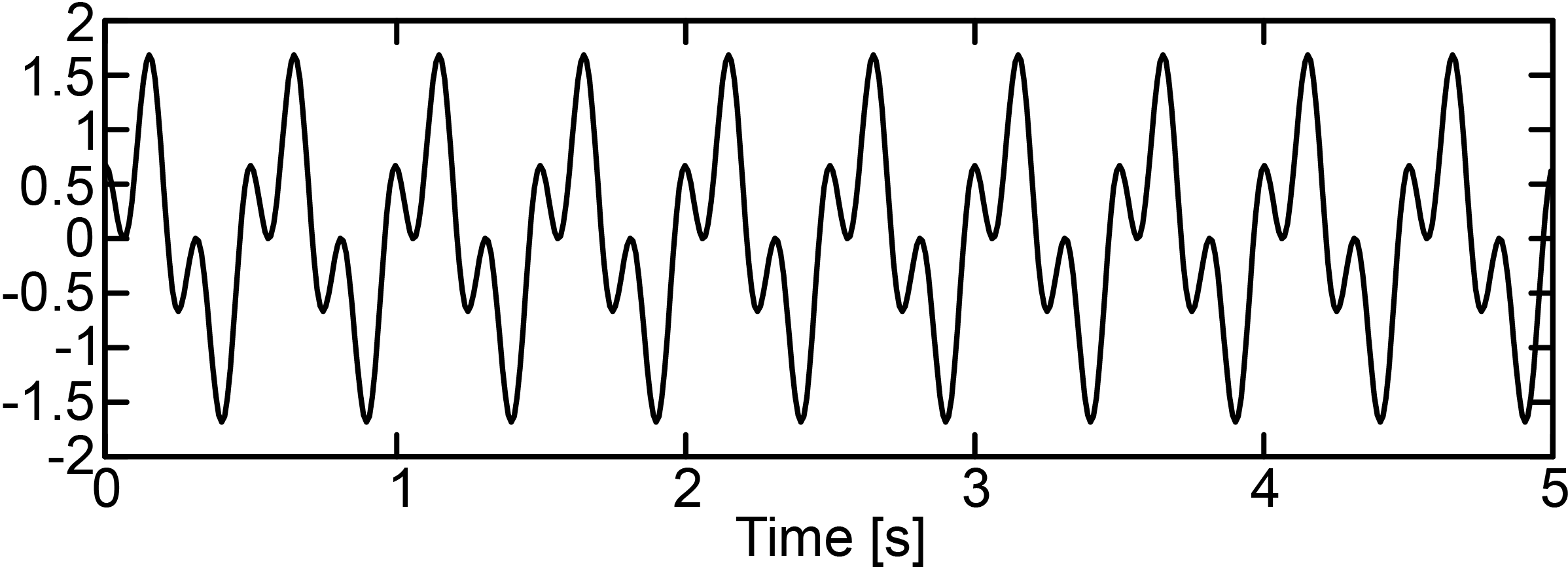
図1.周期信号.
このとき,周期信号は以下のようにフーリエ級数によって表され,必ずしも単一周波数のみを有する正弦波や余弦波である必要はない.
式(2)おける基本周波数$\omega_0\ [\mathrm{rad/s]}$の整数倍$n\omega_0$の周波数を有する正弦波および余弦波が高調波であり,周期信号はそれら高調波$a_n\cos(n\omega_0t)+b_n\sin(n\omega_0t)$および定数項$a_0/2$の重ね合わせであってよい. これらの周期的な傾向は現実世界で多く見られる一方で,現実世界における信号が厳密に式(1)を満たすことはほとんど無く,その多くは周期らしい信号でありつつも厳密には周期信号では無い.さらに,非周期信号においても,式(1)を満たさない信号は全て非周期信号となりその定義の範囲はあまりに広く,我々が直感的に考える非周期信号とは異なることが多い.その上,現実世界における信号の多くは周期らしさと非周期らしさ双方の特徴を含んだ信号である.
準周期信号,準非周期信号,そして周期/非周期信号
厳密には周期および非周期ではないが,周期らしいもしくは非周期らしい信号を取り扱うため,[1]において準周期および準非周期の概念を導入した.さらに,周期らしさと非周期らしさ双方の特徴を含む周期/非周期信号を定義した.ここで,周期/非周期信号$x_{\mathrm{pa}}$は準周期信号$x_{\mathrm{p}}$と準非周期信号$x_{\mathrm{a}}$の和となる.
準周期信号と準非周期信号の定義は周期信号と非周期信号の拡張となっており,準周期信号は一周期ごとの振幅が分離周波数(後述)より低周波で変化する信号である.図2にその一例を示す.そして,それ以外の信号は準非周期信号となる.
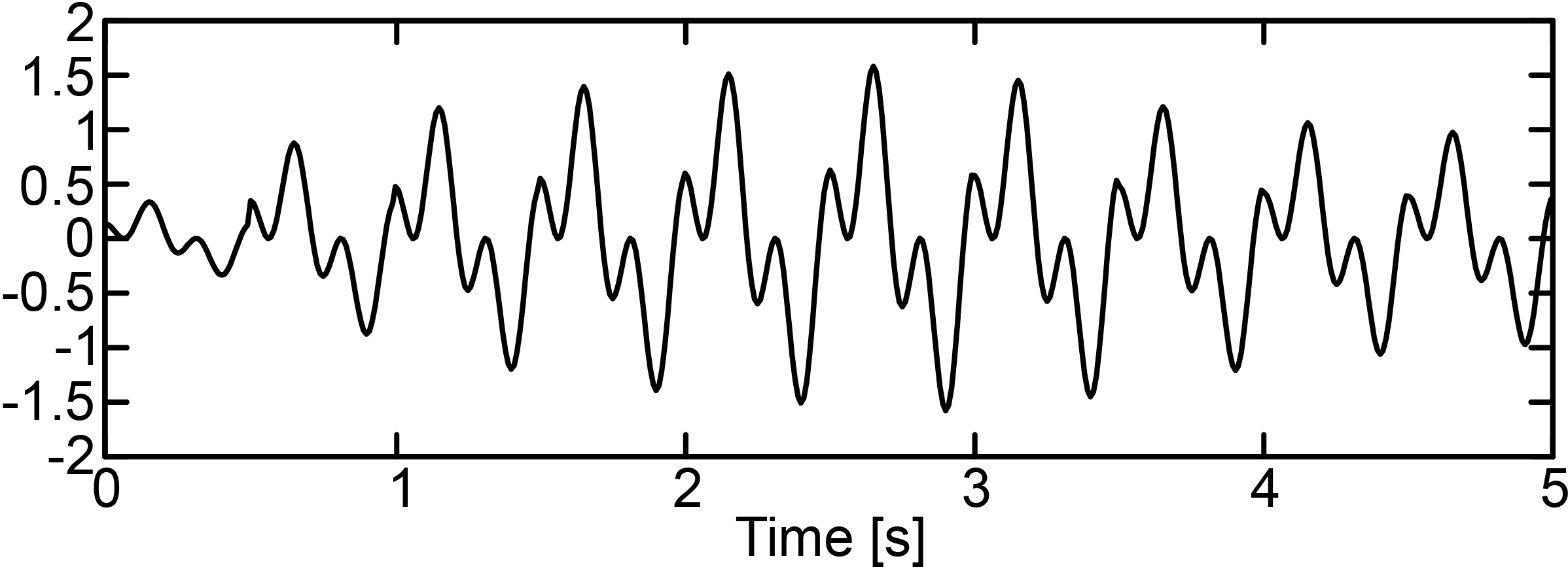
図2.準周期信号.
この,周期/非周期信号$x_{\mathrm{pa}}$より,準周期信号$x_{\mathrm{p}}$と準非周期信号$x_{\mathrm{a}}$を分離するため,周期/非周期分離フィルタを利用する.
1次周期/非周期分離フィルタ
1次周期/非周期分離フィルタは,村松が[2]に提案し,[3]の論文にてロボットの運動制御に利用した周期/非周期分離フィルタである.実用にあたり高次化することは必ずしも必須ではなく,1次周期/非周期分離フィルタの利用で十分であることも多い.図2に周期/非周期信号(Periodic/Aperiodic signal)から準周期信号(Quasi-periodic signal)と準非周期信号(Quasi-aperiodic signal)を分離するブロック線図を示す.
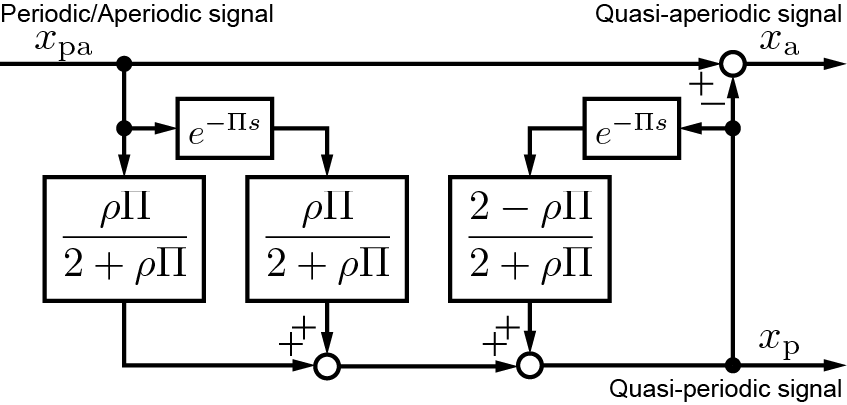
図3.1次周期/非周期分離フィルタのブロック線図.
周期/非周期分離フィルタの特徴として,むだ時間$e^{-\Pi s}$を利用している点があげられる.さらにここで,$\Pi\ [\mathrm{s}]$は周期であり,$\rho\ [\mathrm{rad/s}]$は分離周波数である.周期の値は対象とする準周期信号の周期より決定する.1次周期/非周期分離フィルタは準周期信号$x_{\mathrm{p}}$と準非周期信号$x_{\mathrm{a}}$を抽出する2つの伝達関数を有する.
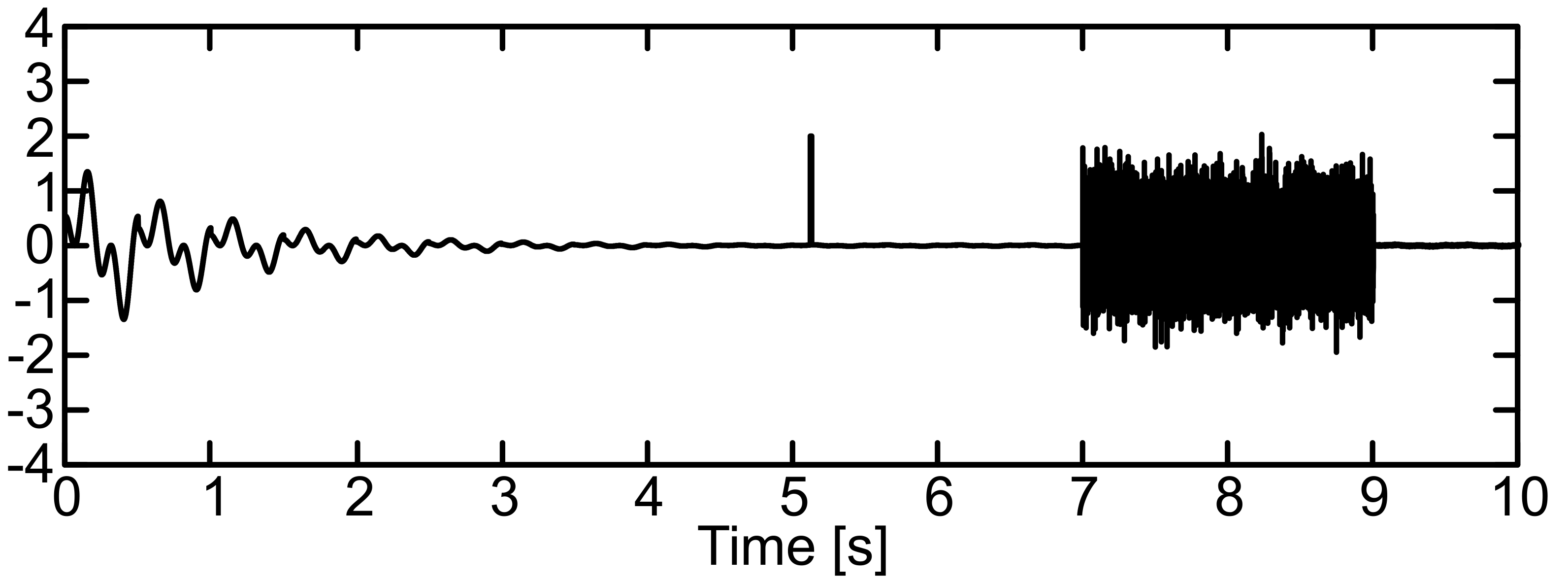
1次周期/非周期分離フィルタを用いた周期/非周期信号の分離例を図4に示す.
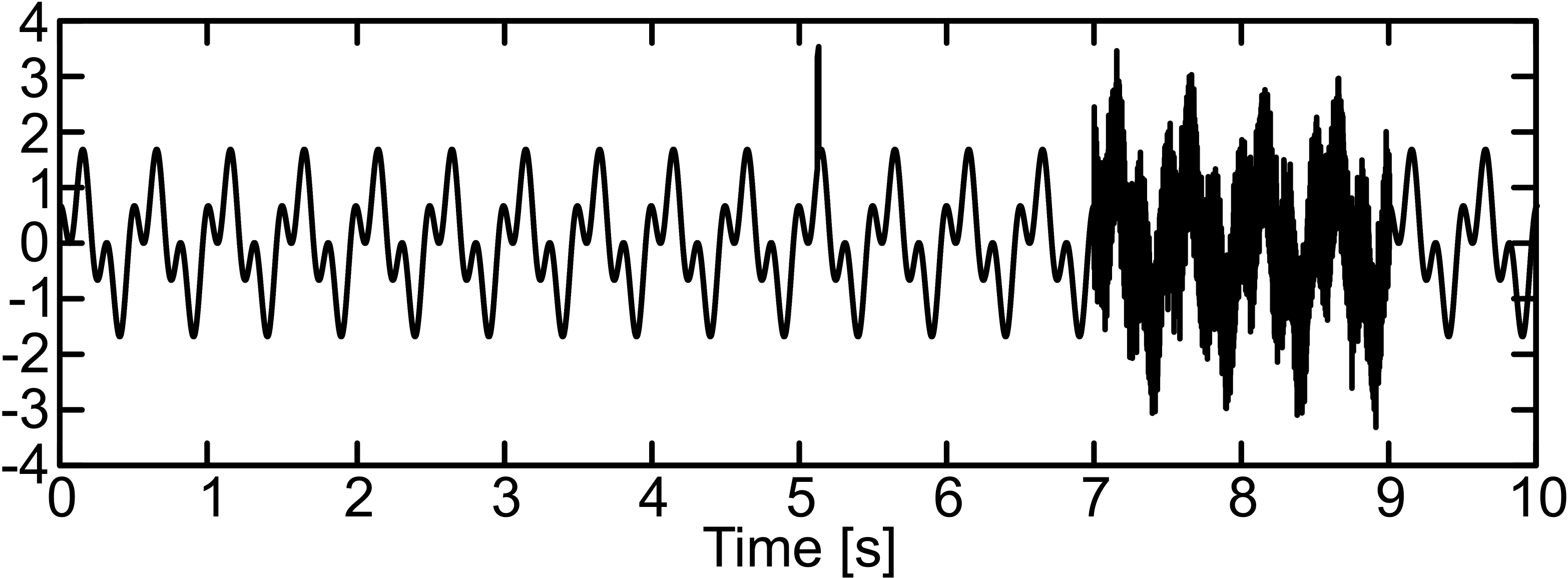
(a) 入力周期/非周期信号.
(b) 出力準周期信号.
(c) 出力準非周期信号.
図4.1次周期/非周期分離フィルタによる周期/非周期分離.周期:$\Pi=0.5\ \mathrm{s}$.分離周波数:$\rho=1\ \mathrm{if}\ t<5\ \mathrm{s},\ \rho=0.01\ \mathrm{otherwise}$
図4の分離例における,$0\ \mathrm{s}$からおよそ$4\ \mathrm{s}$までの変化はフィルタの初期値が零であることに起因する収束の様子である.分離周波数$\rho$はフィルタが収束するまで$1\ \mathrm{rad/s}$に,収束後は$0.01\ \mathrm{rad/s}$に設定している.収束後,周期/非周期信号における高調波を含む周期信号は準周期信号として,$5\ \mathrm{s}$付近の擬似的なインパルス信号と$7\ \mathrm{s}$〜$9\ \mathrm{s}$間の擬似的な白色雑音は準非周期信号として抽出されている.
1次周期/非周期分離フィルタの周波数特性
式(4)および(5)における伝達関数の周波数応答(ボード線図)を図5および図6に示す.
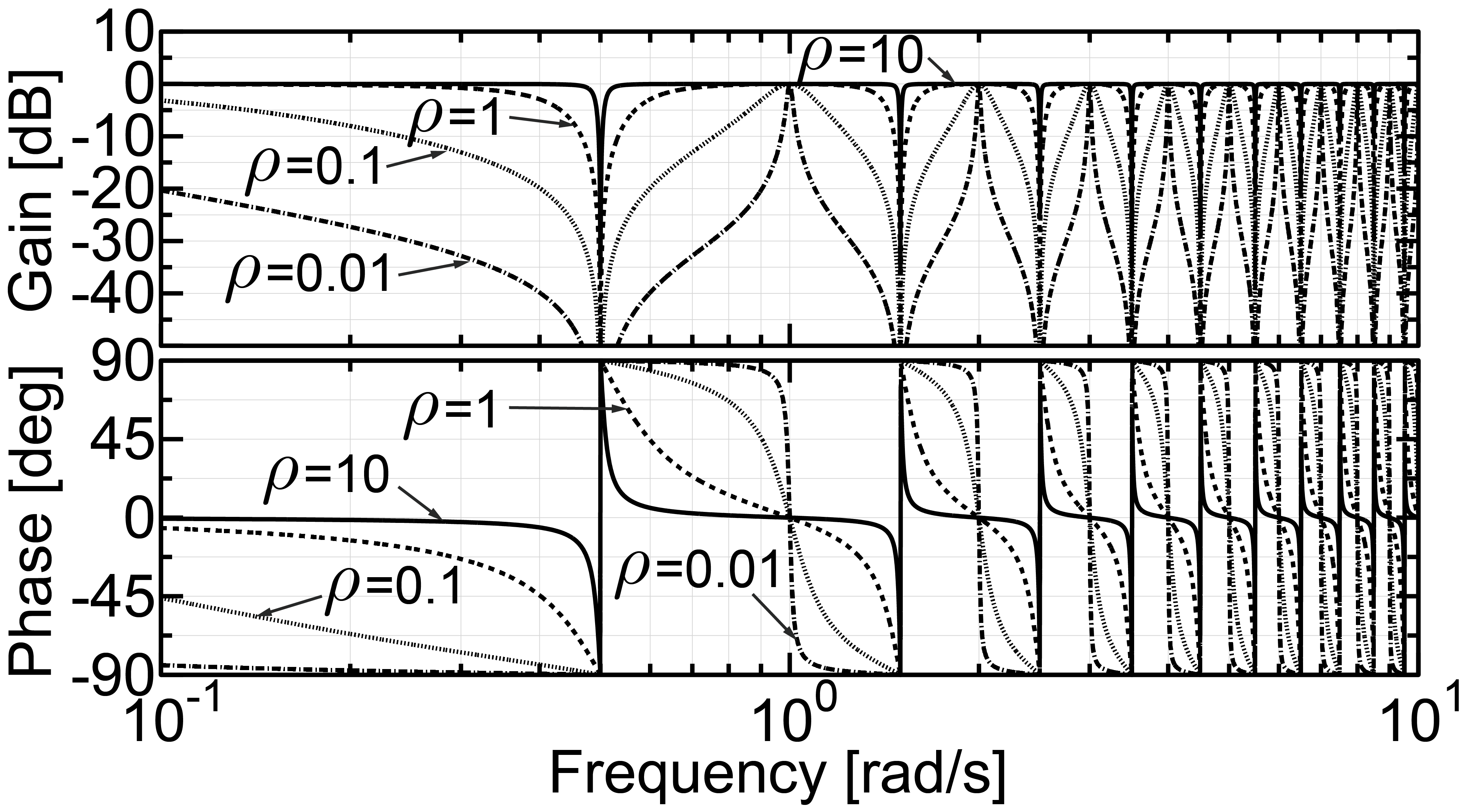
図5.1次周期/非周期分離フィルタの準周期信号通過特性(式(4)の伝達関数).周期:$\Pi=2\pi\ \mathrm{s}$.
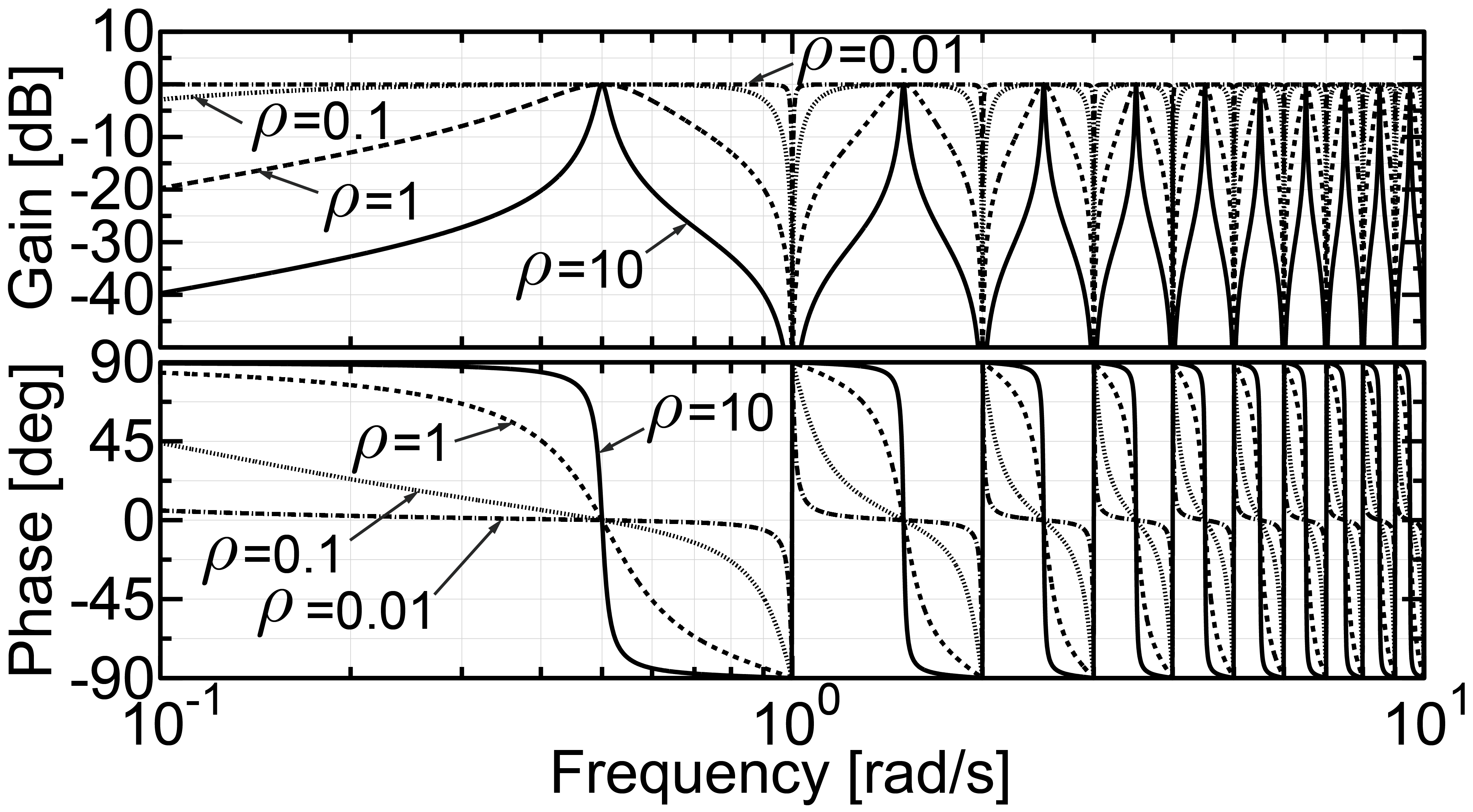
図6.1次周期/非周期分離フィルタの準非周期信号通過特性(式(5)の伝達関数).周期:$\Pi=2\pi\ \mathrm{s}$.
まずは,図5に示す1次周期/非周期分離フィルタの準周期信号通過特性について説明する.式(2)のフーリエ級数に示される通り,周期信号は基本周波数の整数倍$n\omega_0$の高調波を含み,準周期信号もまた高調波を含む.図5および図6の場合においては,周期は$2\pi\ \mathrm{s}$であることから基本周波数は$1\ \mathrm{rad/s}$であり,高調波の周波数は$n\omega_0=1\ \mathrm{rad/s},\ 2\ \mathrm{rad/s},\ \ldots$となる.図5より,準周期信号通過特性は高調波が存在する周波数においてゲインが$0\ \mathrm{dB}$となり,これを通過する.さらに,高調波の間の周波数において,ゲインは小さくなり,これを減衰させる.反対に,図6に示す1次周期/非周期分離フィルタの準非周期信号通過特性においては,高調波が存在する周波数においてゲインが小さくなり,信号を減衰させる.そして,高調波の間の周波数においてゲインが$0\ \mathrm{dB}$となり,信号を通過させる.そして,準周期信号通過特性および準非周期信号通過特性の双方において,通過域で位相は$0\ \mathrm{deg}$となり,遅れや進みは生じない.
次に,分離周波数$\rho$が周波数特性に与える影響について説明する.周期信号は式(2)のフーリエ級数に示される通り,定数項と高調波によってのみ表されるが,準周期信号は定数項,高調波,そして周辺周波数の信号も含む.そして,分離周波数$\rho$が準周期信号の定義にどれだけの広さの周辺周波数を含むかを決定する.これに伴い,分離周波数$\rho$が零のとき準周期信号の定義は周期信号に一致し,分離周波数$\rho$が無限大のとき準周期信号の定義は周期/非周期信号に一致する.準非周期信号についてはその逆であり,分離周波数$\rho$が零のとき準非周期信号の定義は周期/非周期信号に一致し,分離周波数$\rho$が無限大のとき準非周期信号は定義されない.これらは,図5および図6からも確認できる.分離周波数$\rho$が大きくなることによって,図5に示す準周期信号通過特性の信号通過域は広くなり,図6に示す準非周期信号通過特性の信号通過域は狭くなる.逆に,分離周波数$\rho$が小さくなることによって,図5に示す準周期信号通過特性の信号通過域は狭くなり,図6に示す準非周期信号通過特性の信号通過域は広くなる.
分離周波数の設計
分離周波数は1次周期/非周期分離フィルタの分離特性と収束速度に影響を与える.ここでいう分離特性とは周波数特性において上述した通過域の広さであり,分離周波数が大きいと周期/非周期信号から出力される準周期信号の割合が広く,分離周波数が小さいと周期/非周期信号から出力される準非周期信号の割合が狭くなる.一方で,分離周波数が大きいと1次周期/非周期分離フィルタの収束が早くなり,小さいと遅くなる.分かりやすくするため,それらの関係を表にまとめる.
表1.分離周波数の大きさが1次周期/非周期分離フィルタのへ与える影響.
| 分離周波数$\rho$:大きい | 分離周波数$\rho$:小さい | |
|---|---|---|
| 準周期信号通過域 | 広い | 狭い |
| 準非周期信号通過域 | 狭い | 広い |
| 1次周期/非周期分離フィルタの収束速度 | 遅い | 早い |
したがって,図4に示すような分離例のように,抽出したい準周期信号が周期信号(分離周波数が零のとき準周期信号は周期信号となる)もしくはそれに近い場合,分離周波数は小さく設定しなければならない.一方で,準周期信号および準非周期信号に関する事前情報が与えられておらず,初期値が零の場合,1次周期/非周期分離フィルタの収束を待たなければならず,大きい値の分離周波数が求められる.すなわち,これらはトレードオフの関係になっている.
より具体的な設計指針を与える.図5および図6に表される通り,1次周期/非周期分離フィルタは複数の周波数でゲイン線図が$-3\ \mathrm{dB}$を通過する.このゲインが$-3\ \mathrm{dB}$となる周波数を,高調波周波数まわりの通過幅として$n\omega_0\pm \omega_{\mathrm{c}}$とすると,カットオフ周波数$\omega_{\mathrm{c}}$は以下の式で分離周波数を通して設計できる.
このカットオフ周波数により,高調波周波数$n\omega_0$まわりの通過域および阻止域の広さが決定できる.式(6)によりカットオフ周波数を$0.1\ \mathrm{rad/s}$, $0.25\ \mathrm{rad/s}$, および$0.4\ \mathrm{rad/s}$に設定した1次周期/非周期分離フィルタの周波数特性(ゲイン線図)を横軸線形プロットにより図7および図8に示す.
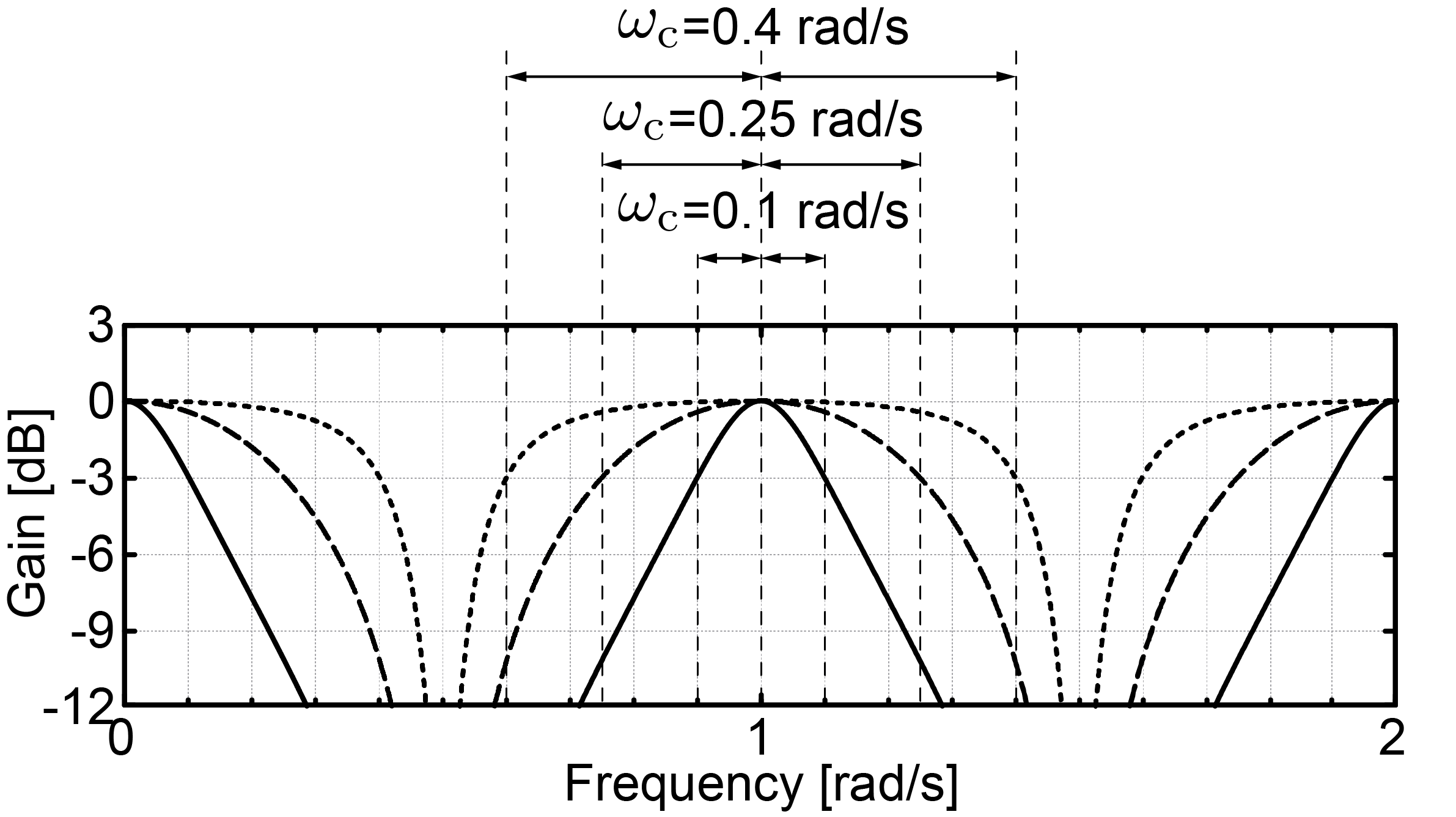
図7.式(6)によりカットオフ周波数を$0.1\ \mathrm{rad/s}$, $0.25\ \mathrm{rad/s}$, および$0.4\ \mathrm{rad/s}$に設定した1次周期/非周期分離フィルタの準周期信号通過特性(式(4)の伝達関数).周期:$\Pi=2\pi\ \mathrm{s}$.
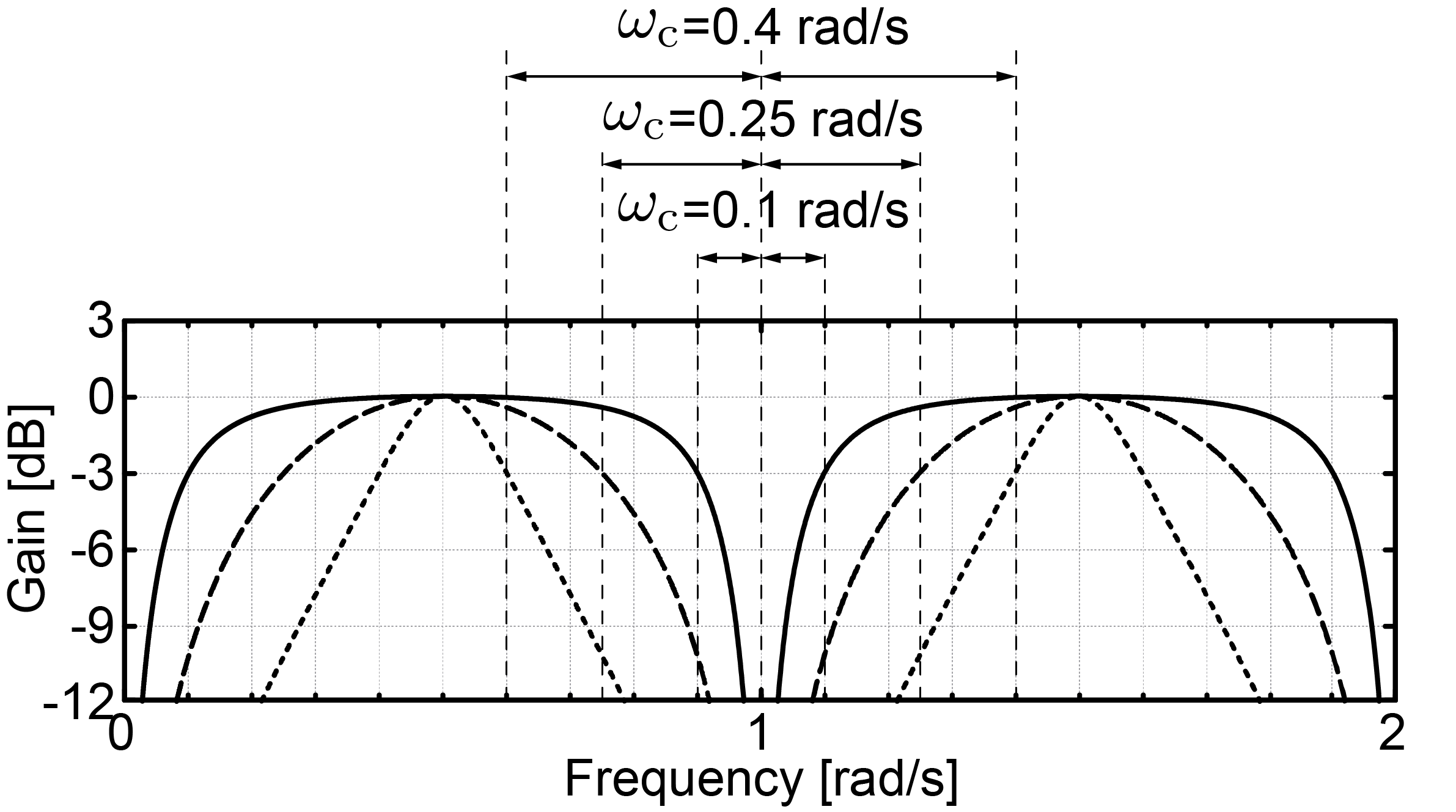
図8.式(6)によりカットオフ周波数を$0.1\ \mathrm{rad/s}$, $0.25\ \mathrm{rad/s}$, および$0.4\ \mathrm{rad/s}$に設定した1次周期/非周期分離フィルタの準非周期信号通過特性(式(4)の伝達関数).周期:$\Pi=2\pi\ \mathrm{s}$.
準周期信号と準非周期信号の周期/非周期信号に占めるバランスはこのカットオフ周波数を用いて設計すると良い.さらに,収束速度に関して,以下のように分離周波数の逆数が収束の時定数$T$となる.
この時定数は図9のように周期信号の振幅の収束に関する時定数であり,図9においては,振動的な波形の頂点を結んだ軌跡がおよそ$63\ \%$収束するために要する時間である.
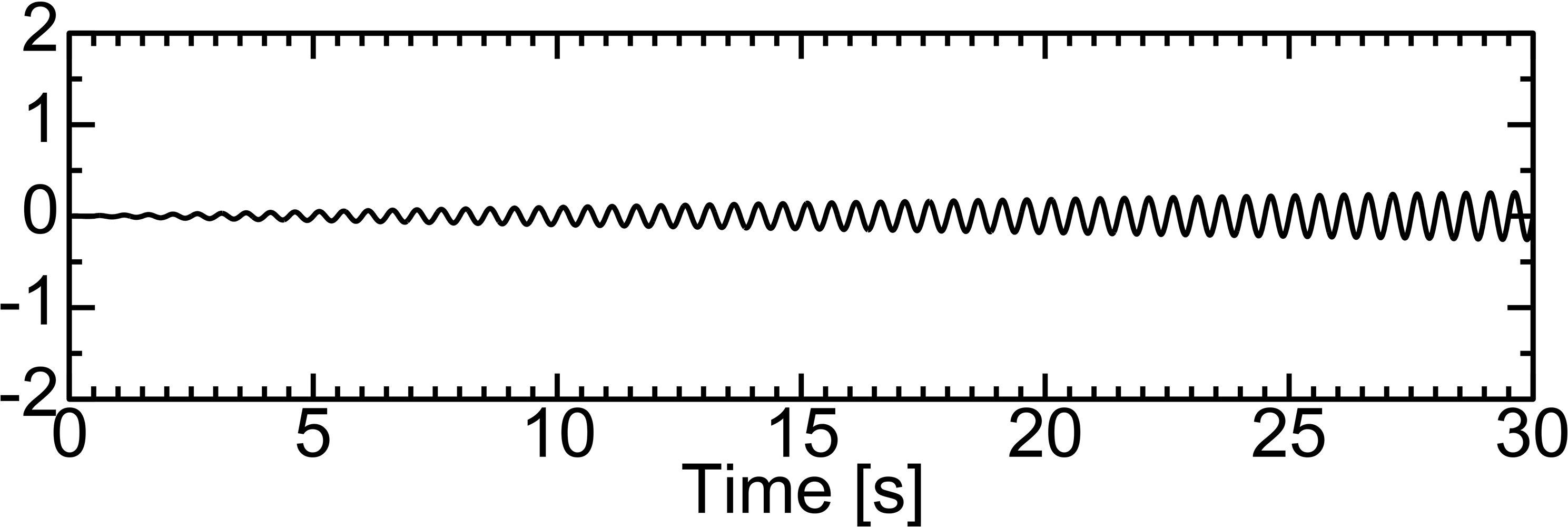
(a) $\rho=0.01\ \mathrm{rad/s}$.
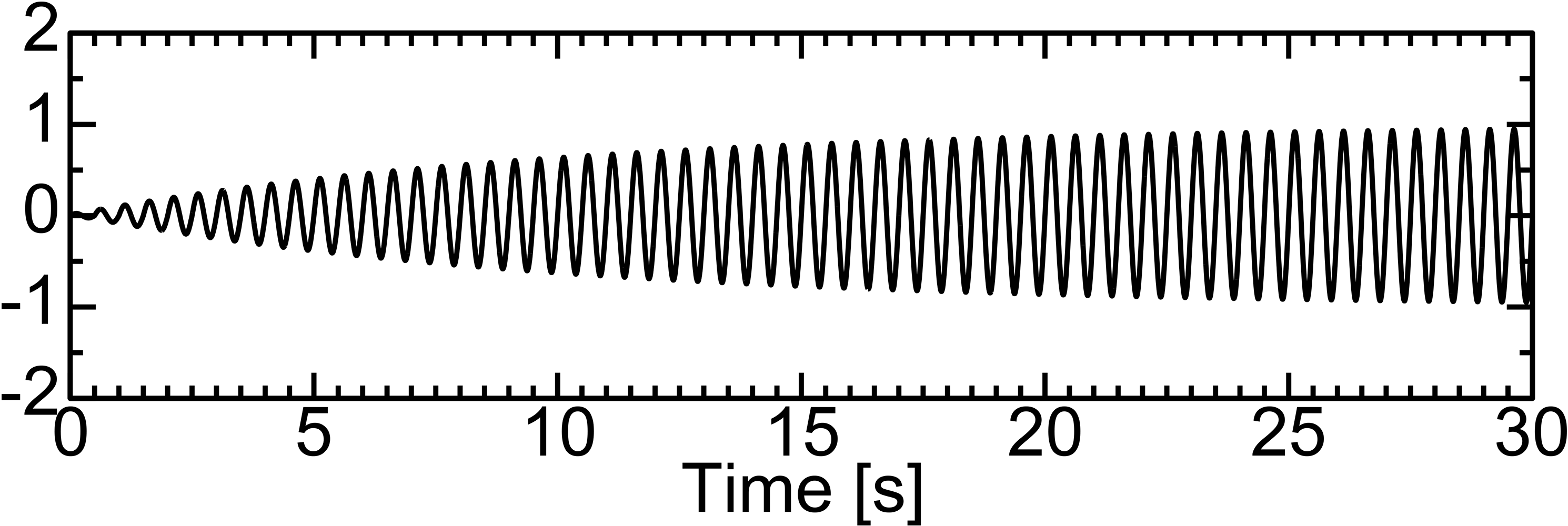
(b) $\rho=0.1\ \mathrm{rad/s}$.
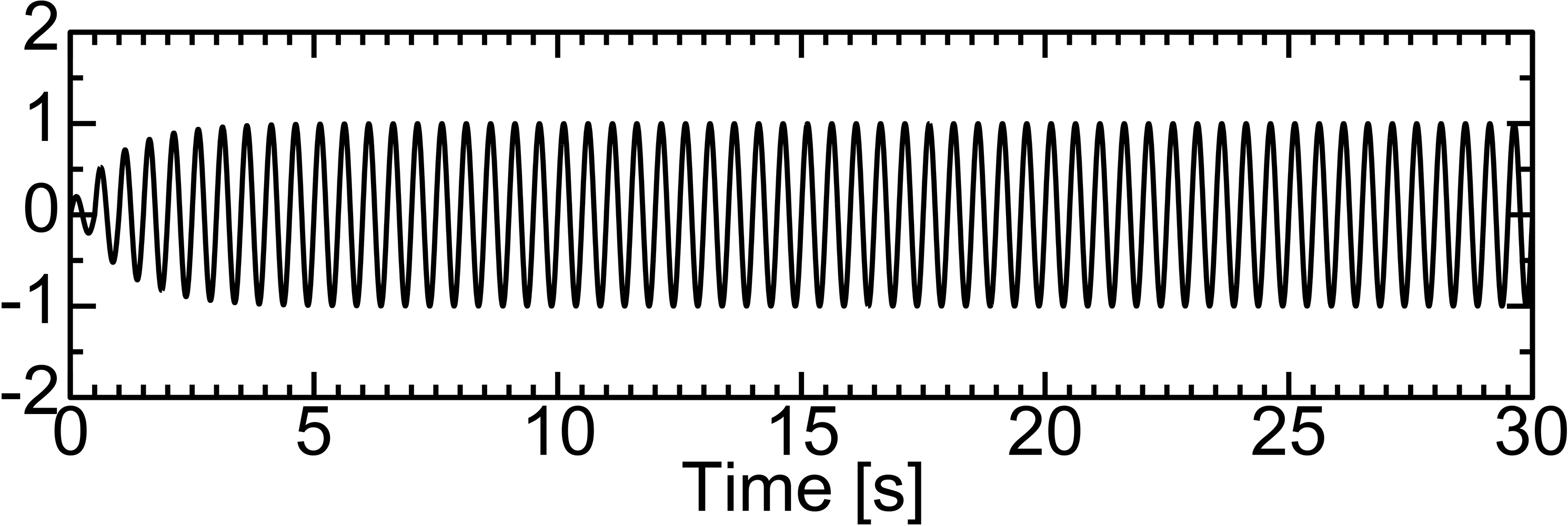
(c) $\rho=1\ \mathrm{rad/s}$.
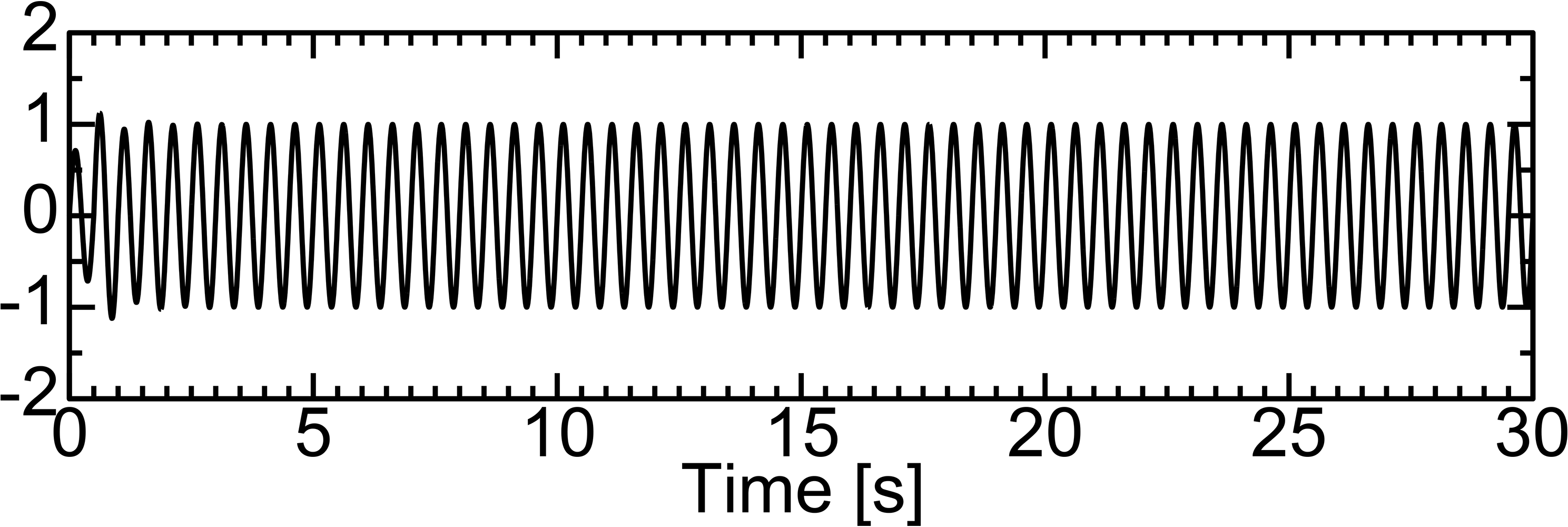
(d) $\rho=10\ \mathrm{rad/s}$.
図9.分離周波数が1次周期/非周期分離フィルタの時定数へ与える影響.周期:$\Pi=0.5\ \mathrm{s}$.1次周期/非周期分離フィルタへの入力信号:$\sin(4\pi t)$.
以上をふまえ,要求されるカットオフ周波数$\omega_{\mathrm{c}}$と時定数$T$より,トレードオフを加味しつつ,式(6)および(7)を用いて分離周波数を設計されたい.
1次周期/非周期分離フィルタの実装
1次周期/非周期分離フィルタのサンプルC++プログラムはhttps://github.com/HisayoshiMuramatsu/PASFよりダウンロードできる.C++の利用が難しい場合,各々の環境において,以下の数式を実装することでも実現可能である.
なお,$x_{\mathrm{p}}(t-\Pi)$および$x(t-\Pi)$は$\Pi$秒前の信号であり,1周期分の信号を記憶することにより実装するとよい.
周期/非周期分離フィルタの応用
周期/非周期分離フィルタはロボット制御,精密かつ柔軟な協働ロボット制御,食品包装の異常包装検知,工作機械のびびり振動検知等に応用可能である.周期/非周期分離フィルタに関する質問・学術指導・共同研究などに興味がある場合は村松(muramatsu (at) hiroshima-u.ac.jp)までお気軽にご連絡ください.
参考文献
[1] Hisayoshi Muramatsu, “Separation and Estimation of Periodic/Aperiodic State,” Automatica, vol. 140, p. 110263, Jun. 2022.
[Automatica], [DOI: 10.1016/j.automatica.2022.110263], [arXiv (Open Access)], [Research Gate]BibTex
@article{MURAMATSU2022110263,author = {Hisayoshi Muramatsu},
title = {Separation and estimation of periodic/aperiodic state},
journal = {Automatica},
volume = {140},
pages={110263},
month = {Jun.},
year = {2022}}
概要紹介
周期/非周期状態,準周期状態,準非周期状態を新たに定義し,周期通過関数と非周期通過関数の線形性および準周期状態関数と準非周期状態関数の直交性を証明した論文.さらに,周期/非周期分離フィルタ(PASF)とカルマンフィルタ(KF)を統合した手法KF-PASFを提案し,誤差の期待値が零となる不偏推定,誤差分散と準周期誤差分散および準非周期誤差分散の和が等しくなることを証明した.[2] Hisayoshi Muramatsu and Seiichiro Katsura, “Separated Periodic/Aperiodic State Feedback Control Using Periodic/Aperiodic Separation Filter Based on Lifting,” Automatica, vol. 101, pp. 458–466, Mar. 2019.
[Automatica], [DOI: 10.1016/j.automatica.2018.12.023], [Research Gate],BibTex
@article{MURAMATSU2019458,title = {Separated periodic/aperiodic state feedback control using periodic/aperiodic separation filter based on lifting},
journal = {Automatica},
volume = {101},
pages = {458-466},
year = {2019},
issn = {0005-1098},
author = {Hisayoshi Muramatsu and Seiichiro Katsura},
month=Mar,}
概要紹介
周期/非周期分離フィルタおよび周期/非周期状態フィードバック制御を最初に提案した論文.リフティングによる状態の再表現を行い,従来の周期状態と非周期状態の定義を拡張した.そして,周期/非周期分離フィルタを提案し,分離された状態をフィードバックすることで周期/非周期状態フィードバック制御を実現した.周期/非周期状態フィードバック制御システムにおける分離された状態制御,状態推定,状態分離の安定性が独立して設計できることを示す分離定理を証明した[3] Hisayoshi Muramatsu and Seiichiro Katsura, “Periodic/Aperiodic Motion Control Using Periodic/Aperiodic Separation Filter,” IEEE Transactions on Industrial Electronics, vol. 67, no. 9, pp. 7649–7658, Sep. 2020.
[IEEE Xplore (Open Access)], [DOI: 10.1109/TIE.2019.2942535], [Research Gate],BibTex
@ARTICLE{8858034,author={Muramatsu, Hisayoshi and Katsura, Seiichiro},
journal={IEEE Transactions on Industrial Electronics},
title={Periodic/Aperiodic Motion Control Using Periodic/Aperiodic Separation Filter},
year={2020},
volume={67},
number={9},
pages={7649-7658},
month=Sep,}
概要紹介
Automatica (2019)で村松が提案した周期/非周期分離フィルタを基に,1次周期/非周期分離フィルタを構築し,ロボットのモーションコントロールへ応用した.相反する位置制御,インピーダンス制御,力制御を周期運動と非周期運動へ分離して実装し,それらを組み合わせた6種の運動制御法を提案した.例として,周期位置/非周期インピーダンス制御では,周期的に位置制御にて精密動作を行いつつ,突発的な人間との接触に対してインピーダンス制御による柔らかい対応が可能となる.[4] 村松 久圭, “周期/非周期分離フィルタによるモーションコントロール”, システム/制御/情報,vol. 66,no. 11,pp. 421–426,Nov. 2022.
[J-STAGE (Open Access)], [DOI:10.11509/isciesci.66.11_421],BibTex
@article{MURAMATSU2022ISCIE,title={周期/非周期分離フィルタによるモーションコントロール},
author={村松 久圭},
journal={システム/制御/情報},
volume={66},
number={11},
pages={421-426},
year={2022}}