, Hisayoshi Muramatsu
直動関節機構を用いた移動型四腕ロボット
概要
本研究紹介は,これまでに開発した移動型四腕ロボット(H. Muramatsu, et al., Journal of Robotics and Mechatronics, 2025)へ直動関節機構を開発し,可搬重量を改善した研究開発について紹介する.
まずは以下に,動画とともに概要を説明する. 本研究室は整地に適した車輪移動能力・不整地に適した三脚車輪移動能力・四腕による把持操りの複合能力を有する移動型四腕ロボット:ARMSを開発している. そこでさらに直動関節機構を開発することで,減速機に比べて軽量な減速と回転・直動変換を実現し,可搬重量の増強に成功した. 動画の通り,操作デバイスを用いて,物体搬送・整地車輪走行・不整地歩行(坂・ブロック環境)のタスクを実現した.
機構
ギアボックスよりも軽量で減速可能かつ,高トルク/力変換比を実現する直動関節機構を開発した.モータがプーリを回転させ,左右のエンドエフェクタに固定されたタイミングベルトを駆動することで,エンドエフェクタを直動させる機構となっている.歩行用(左)と把持用(右)の2種類のエンドエフェクタを両端に備えており(図1左),ARMSの移動と操りの多様な機能への適応性を高めている.開発した直動関節機構を,ARMSの左右後腕に図1右のように搭載した.
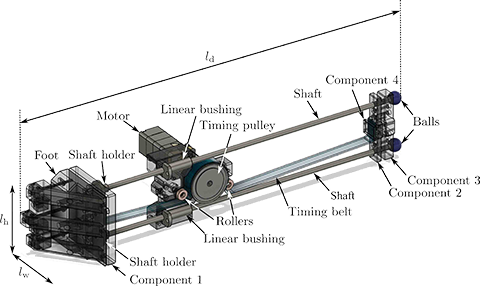
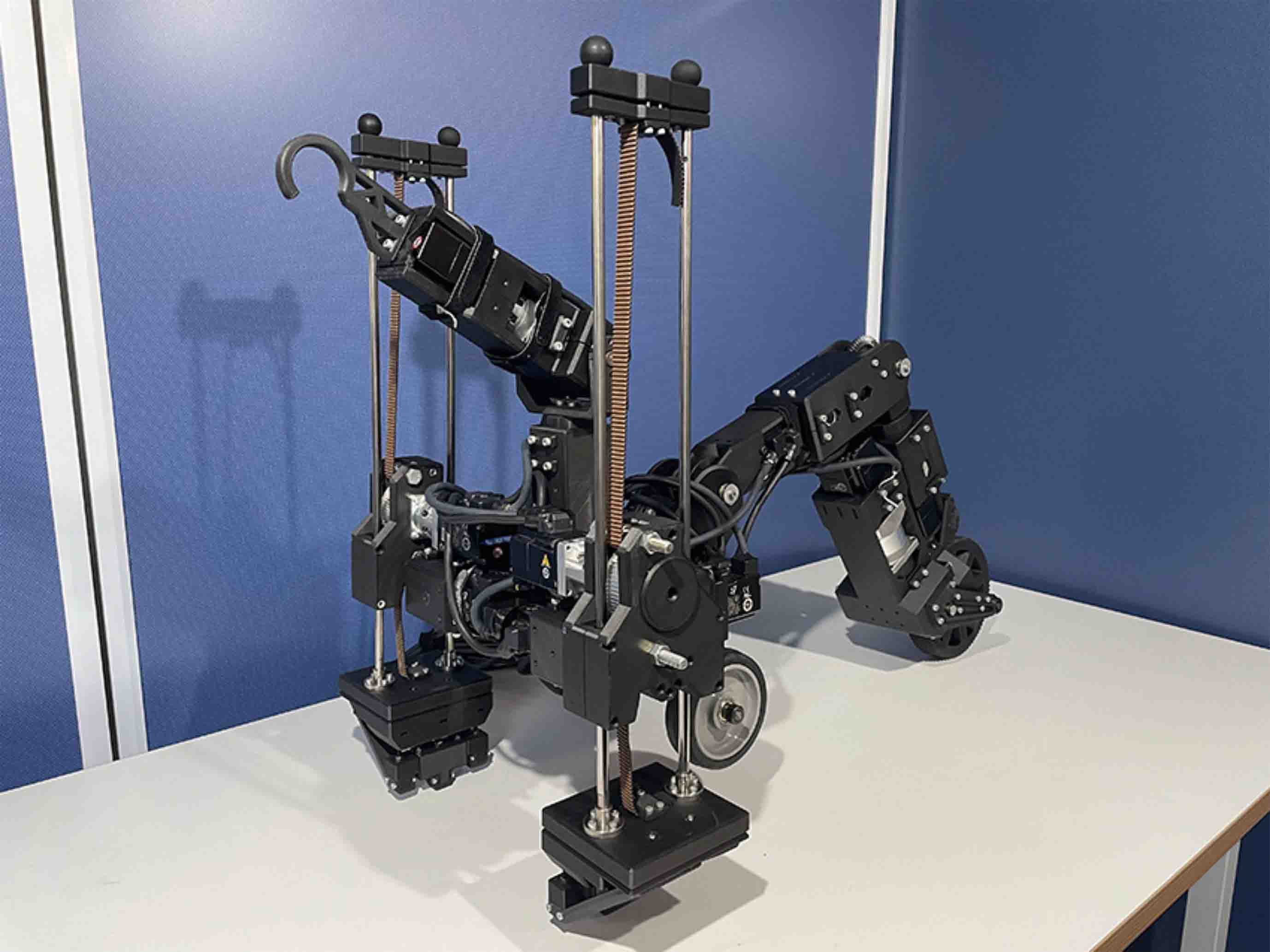
図1.ARMSと直動関節機構.
操作力楕円体解析
モータトルクが$\|\tau\|\leq1$を満たす作業力の集合が操作力楕円体であり,操作力楕円体が大きければ大きいほど,その方向へ大きな力が発揮できる.従来の回転関節機構(図2左)と提案の直動関節機構(図2右)の操作力楕円体を比較すれば,直動関節機構の方がより大きな操作力楕円体を示した.すなわち,直動関節機構がより高いトルク/力変換比を有しており,同じモータを用いていても直動関節機構の方がより強い力を発揮できると言うことである.これにより,可搬重量の増強や,より力強い歩行が可能となる.
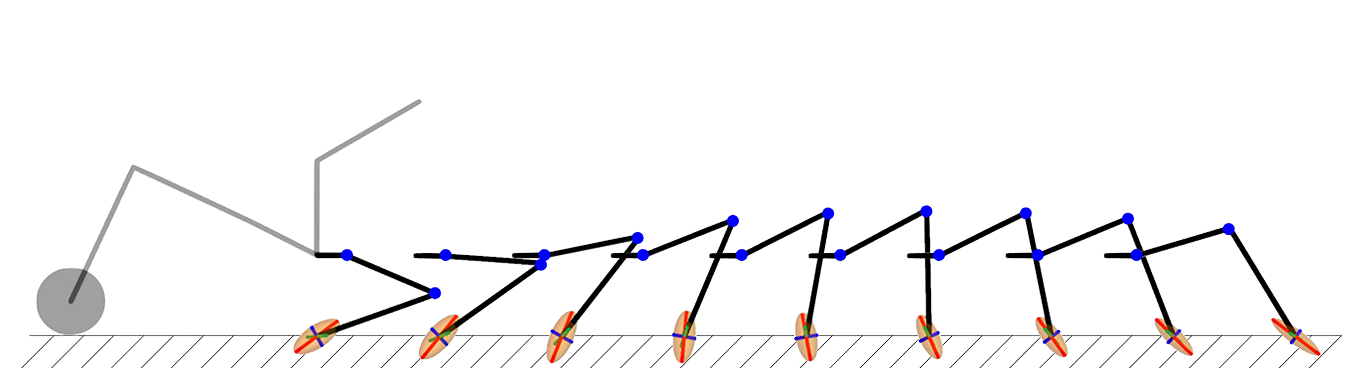
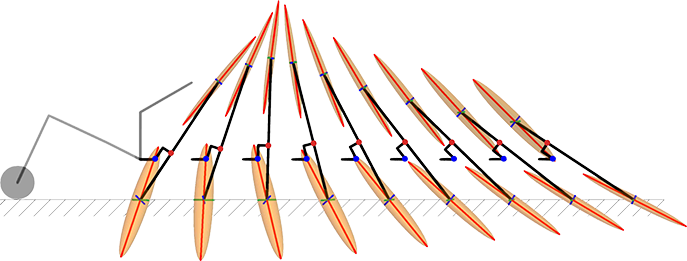
図2.回転関節機構と直動関節機構の操作力楕円体の比較.
まとめ
移動型四腕ロボット:ARMSのために開発した直動関節機構について紹介した.移動ロボットには可搬重量を高めるためにも軽量さが重要であり,本直動関節機構は移動ロボットに特に適している. 本機構の前身となる発表は[2]に掲載されており,上述および詳細な内容は現在査読中である.
謝辞
本研究は2024年度において競輪(JKA 補助事業)の補助を受け実施したものである.
参考文献
[2]
Keigo Kitagawa, Jun Watanabe, and Hisayoshi Muramatsu,
“Prismatic Joint Mechanism for Wheel-Legged Locomotion with Pushing Force Enhancement,”
The 2024 16th IEEE/SICE International Symposium on System Integration (SII 2024),
Ha Long, Vietnam, 8–11 January 2024.
移動型四腕ロボット
[1] Hisayoshi Muramatsu, Keigo Kitagawa, Jun Watanabe, Yuika Yoshimoto, and Ryohei Hisashiki, “A Mobile Quad-Arm Robot ARMS: Wheeled-Legged Tripedal Locomotion and Loco-Manipulation,” Journal of Robotics and Mechatronics, vol. 37, no. 2, pp. 489-499, Apr. 2025.
[Fuji Technology Press (Open Access)], [DOI:10.20965/jrm.2025.p0489], [Research Gate]BibTex
@article{Muramatsu_2025jrm,title={A Mobile Quad-Arm Robot ARMS: Wheeled-Legged Tripedal Locomotion and Loco-Manipulation},
author={Hisayoshi Muramatsu and Keigo Kitagawa and Jun Watanabe and Yuika Yoshimoto and Ryohei Hisashiki},
journal={Journal of Robotics and Mechatronics},
volume={37},
number={2},
pages={489-499},
year={2025},
doi={10.20965/jrm.2025.p0489}
month={Apr}}
概要紹介
整地のための車輪走行能力,不整地のための三脚車輪移動能力,四腕協調による物体把持・操り能力を有する12軸移動型四腕ロボット:ARMSを提案した論文.四腕はそれぞれ異なる構造を有しており,腕1は先端に駆動輪を有し,腕2および3は先端にバネを有し,腕4には作業用のエンドエフェクタが取り付けられている.なお,胴体には受動輪が取り付けられている.それぞれの腕は移動および操り等の複数の目的に利用できる汎用性を有するように設計されており,制御は角度・角速度・角加速度・トルク制約に基づき実装されている.実験では,脚車輪歩行・車輪走行・車輪走行&物体把持・カバン運びを実施し,ARMSの脚車輪によるハイブリッド移動能力とタスク実行能力を検証した.概要
本研究紹介は村松らが提案した移動型四腕ロボット:ARMS[1]について紹介する.より詳細に興味がある場合は参考文献[1]を読んでいただきたい.
まずは以下に,動画とともに概要を説明する. 本研究は整地に適した車輪移動能力・不整地に適した三脚車輪移動能力・四腕による把持操りの複合能力を有する移動型四腕ロボット:ARMSを開発した. 動画の通り,ARMSはこれまで三脚車輪移動・車輪移動・車輪走行中の把持・カバン運搬のタスクを実現してきた.
機構
ARMSは図1のような駆動輪付き12軸移動型四腕ロボットである.本ロボットは,先端に駆動車輪が取り付けられた3自由度の前腕,2つの直列弾性を有する3自由度後腕,背面の2自由度上腕を有する.2つの後腕は歩行移動および物体の把持・操りの双方に利用され,上腕のエンドエフェクタは他腕との協調によって位置および姿勢を決定する.さらに胴体下部には駆動しない受動車輪が2つ取り付けられており,歩行中の胴体支持および車輪走行に利用される.
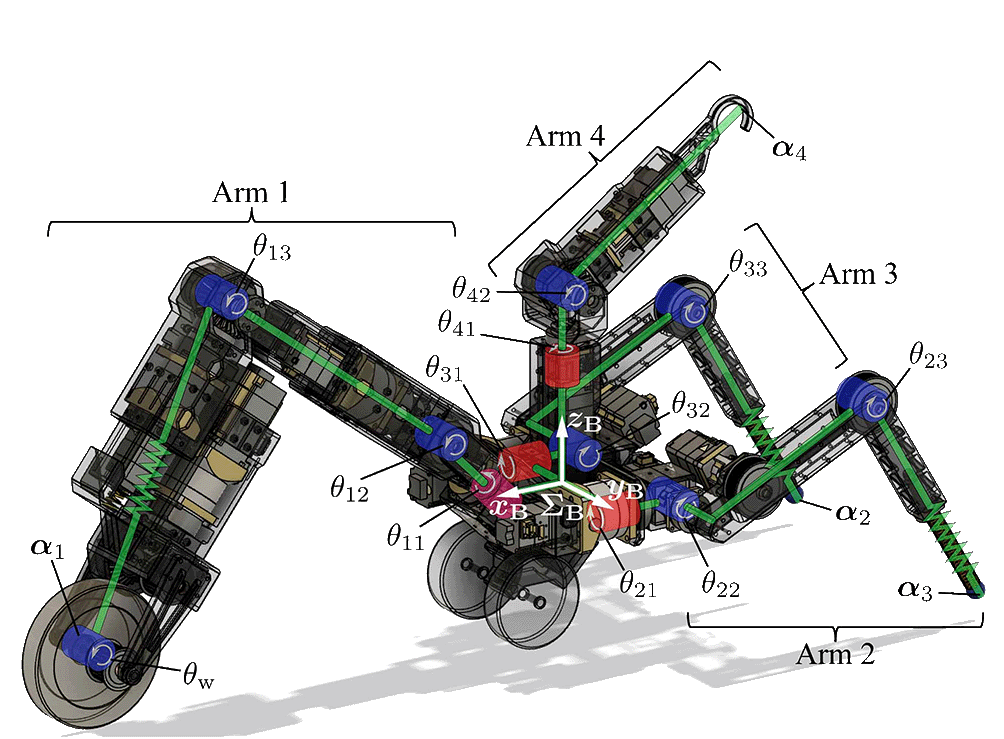
図1.ARMSの三脚車輪移動姿勢.
ARMSは図1のような駆動車輪付き前腕および後腕を用いた三脚車輪歩行のみならず,図2のような駆動車輪付き前腕および胴体付きの受動車輪を用いた車輪走行・車輪走行中の把持・前後腕による立ち上がりが可能である. これらより,ARMSが脚移動および車輪移動を融合したハイブリッドモビリティを有しており,ARMSの腕は移動および把持等の複数目的に利用可能な汎用腕であることが分かる.
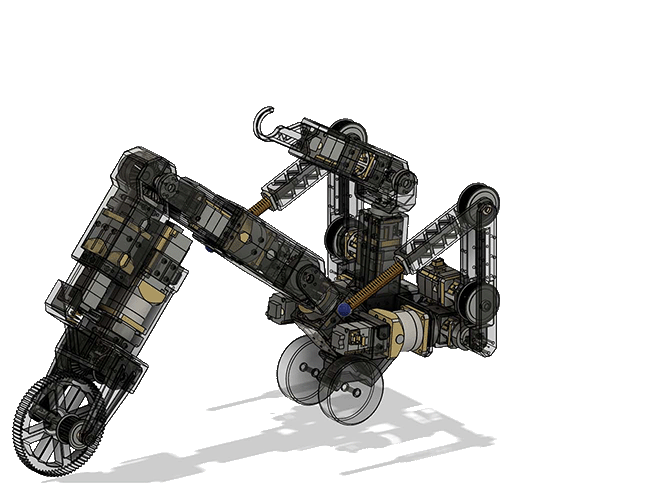
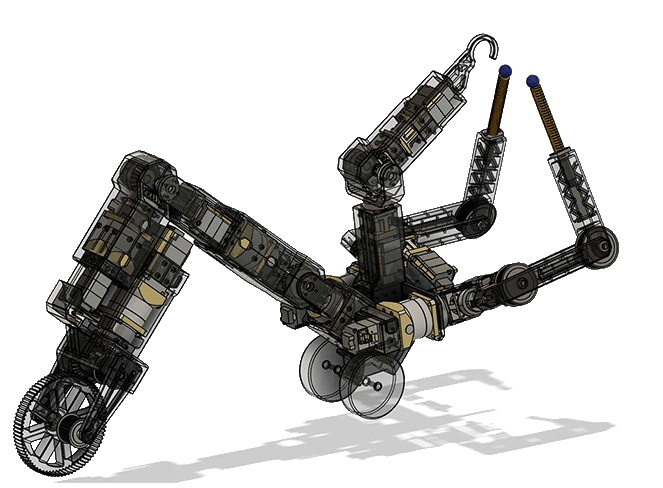
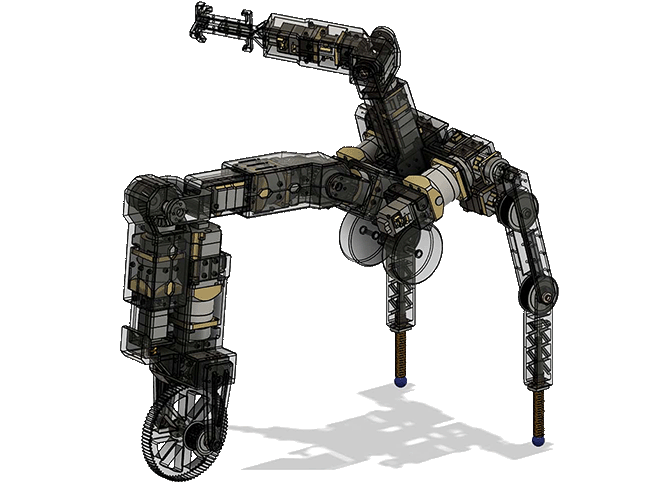
図2.ARMSの車輪移動・車輪移動&把持・立ち上がり姿勢.
制御
ARMSの制御アルゴリズムは図3のように構成されている.まず,ARMSの各腕および駆動車輪の動作を生成し,逆運動学により各関節の角度指令を決定する.その後,軌跡修正アルゴリズムを通して,設定した角度制約・角速度制約・角加速度制約(ロボットの機械的制約)を満たすように角度指令を角度参照値へと修正する.その後,トルク飽和を考慮した角度制御:プロクシベースド・スライディングモード制御器によりモータトルクを計算する.なお,各腕の先端位置はエンコーダ情報および順運動学から得られる.
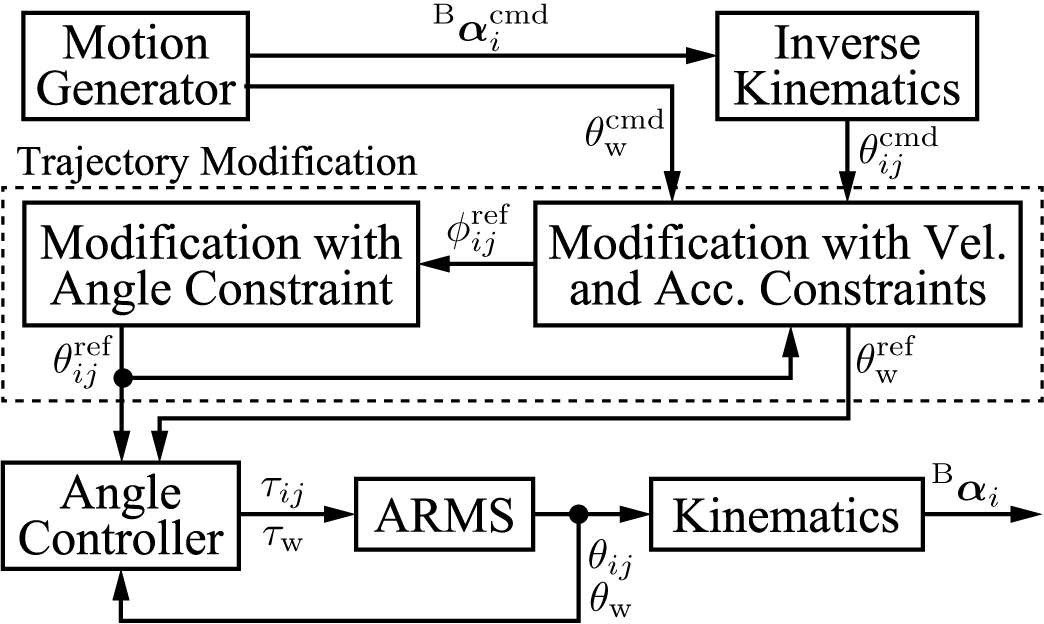
図3.制御システム
まとめ
移動型四腕ロボット:ARMS[1]について紹介した.本ロボットは脚車輪によるハイブリッドモビリティおよび複数の汎用腕を有している.さらに,脚移動が最低限かつ安定な3脚により実現されており,汎用腕および3脚移動はロボットのモータ数および重量の低減に貢献している.なお,本ロボットは未だ試作段階であり,今後も研究開発を継続していく.そして将来的に,本ロボットは人命救助,災害復旧,そして建設現場における作業の自動化および安全化に寄与することが期待される.
謝辞
本研究は2022年度において競輪(JKA 補助事業)の補助を受け実施したものである.