, Hisayoshi Muramatsu
概要
本研究紹介は人間とロボットのインタラクションへ人間の無意識的動作が与える影響について明らかにした村松らの論文[1]について解説する.より詳細に興味がある場合は参考文献に記載する論文[1]を読んでいただきたい.
人間とロボットの関係性
フィードフォワードとフィードバック
人間とロボットの物理的接触を伴う関係性として,フィードフォワード(単方向)なインタラクションとフィードバック(双方向)なインタラクションが存在する. フィードフォワードなインタラクションは人間がロボットを道具として利用する・ロボットが人間をアシストするといった関係性が挙げられ,フィードバックを有するインタラクションは互いに力を調整する共同作業が挙げられる. フィードフォワードなインタラクションは人間動作とロボット動作が安定であればインタラクションもまた安定であるが,フィードバックを有するインタラクションはそれぞれが安定であってもフィードバックループによりインタラクションが不安定化する危険性がある.
人間とロボットの喧嘩と安定性
インタラクションが不安定化すると,人間とロボットの力は増大し発散していく. これはいわば,人間とロボットが喧嘩しているような状態であり,人間にとってそのようなロボットは使いにくく危険な存在となってしまう. そこで,人間とロボットの親密なインタラクションには,人間動作およびロボット制御の双方が安定なインタラクションを心がけなければならない. しかし,人間は意識動作に反して無意識動作を変化させることは困難である. その上,人間の無意識動作が人間とロボットのインタラクションへ与える影響はこれまで着目されてこず,未知であった.
人間の無意識動作は危険?安全?
そこで,人間の無意識動作は人間とロボットのインタラクションを安定化するのだろうか?それとも不安定化するのだろうか? 人間の無意識動作がインタラクションへ与える影響について研究した.
離散事象インタラクション
本研究は図1に示す主観的に安定限界な離散事象インタラクションを対象として研究を実施した. 本インタラクションでは,人間とロボットがお互いに力再現を繰り返し行う. ロボットは力制御により精密に人間から与えられた力を再現するが,人間は主観的に同じ力を再現すれど,無意識的にバイアスがのってしまう. もし,このバイアスが存在しない場合(人間から見た主観的には),人間とロボットが同じ力を与え合い続ける安定限界なインタラクションとなっている.
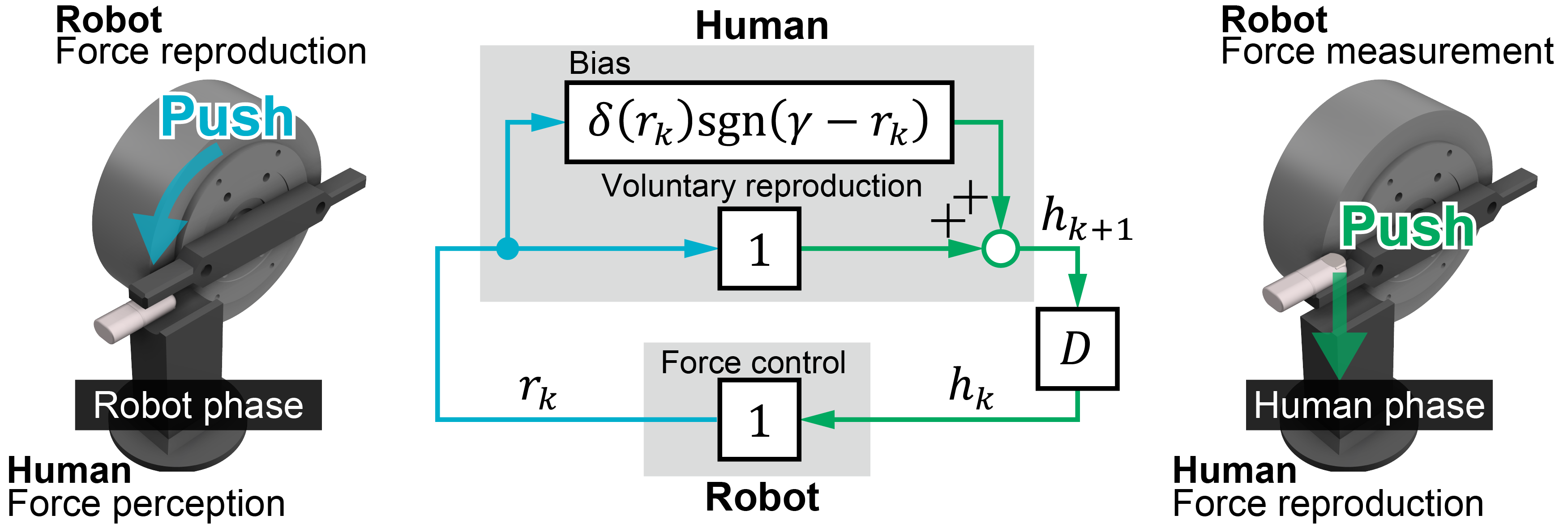
図1.主観的に安定限界な離散事象インタラクション.
仮説
本研究は2つの仮説を提示した.1つ目は人間の力再現におけるバイアスのモデル化についてである.2つ目はバイアスおよびインタラクションモデルに基づき導出された漸近安定条件についてである.
【仮説1】人間の力再現バイアス$U(r_k)$は$U(r_k)=\delta(r_k)\mathrm{sgn}(\gamma-r_k)$に従う.ここで,$\delta(r_k)$および$\gamma$は陰的ゲインと隠的平衡点である.
【仮説2】漸近安定条件$[r_k\delta(r_k)-2|\gamma-r_k|]\delta(r_k)<0\ \mathrm{if}\ r_k\neq\gamma$を満たすならば,主観的に安定限界な離散事象インタラクションにおける陰的平衡点$\gamma$は漸近安定である.
この陰的平衡点$\gamma$が漸近安定であれば,インタラクション中に発生する人間とロボットの力は陰的平衡点へと収束することになる.
人間の力再現実験
ロボットが人間へ力$r_k$を与え,人間がこれを再現した力$h_{k+1}$の比率$h_{k+1}/r_k$を計測した(図2).この際,陰的平衡点$\gamma$は$h_{k+1}/r_k=1$を満たす$r_k$に対応する.
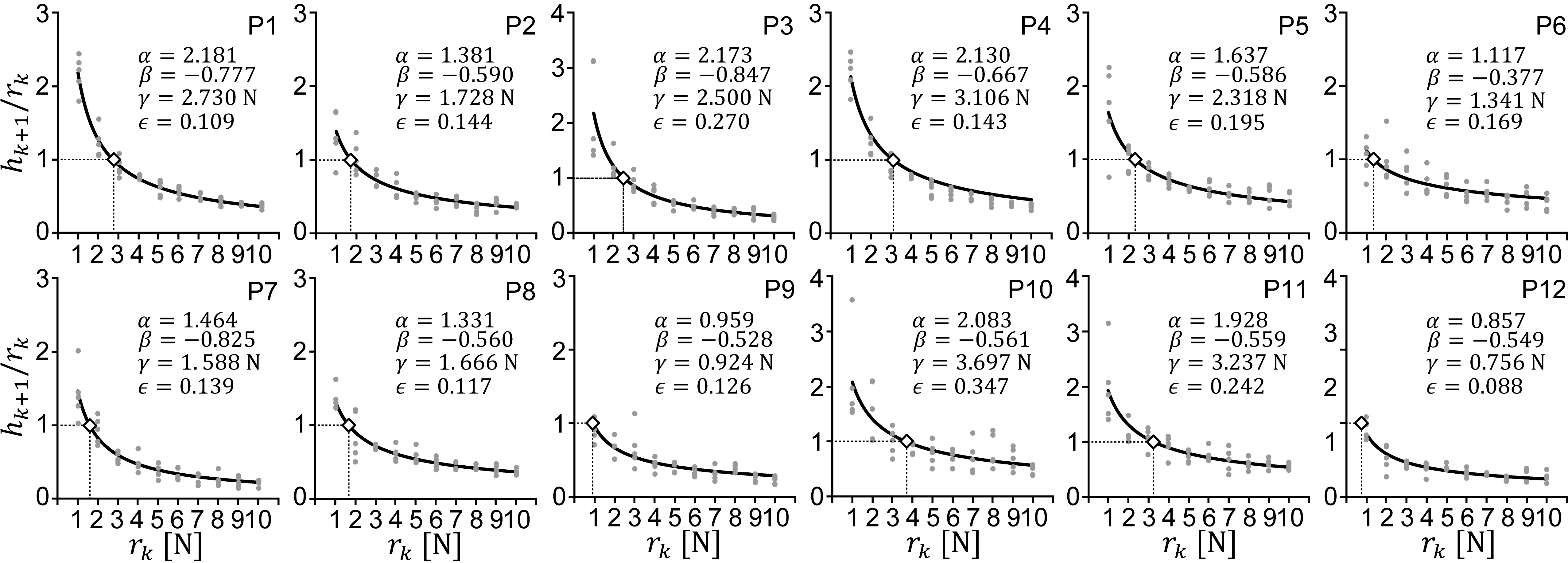
図2.力再現モデルフィッティング.
ここで,陰的平衡点$\gamma$は被験者(P1–P12)によって異なることが見てとれる. そして,【仮説2】が満たされれば,インタラクションにおいて発生する力が各々の陰的平衡点$\gamma$へ収束していくことが予想できる.
漸近安定解析
人間の力再現結果を正規化&統合し,【仮説2】の漸近安定条件と照らし合わせる安定性解析を実施した. 【仮説2】の漸近安定条件における左辺を評価値$E$としてプロットしたものが図3となり,力が陰的平衡点の近傍($r_k/\gamma=1$の近傍)にある際に平衡点は不安定となり,遠方において漸近安定となることがわかる.
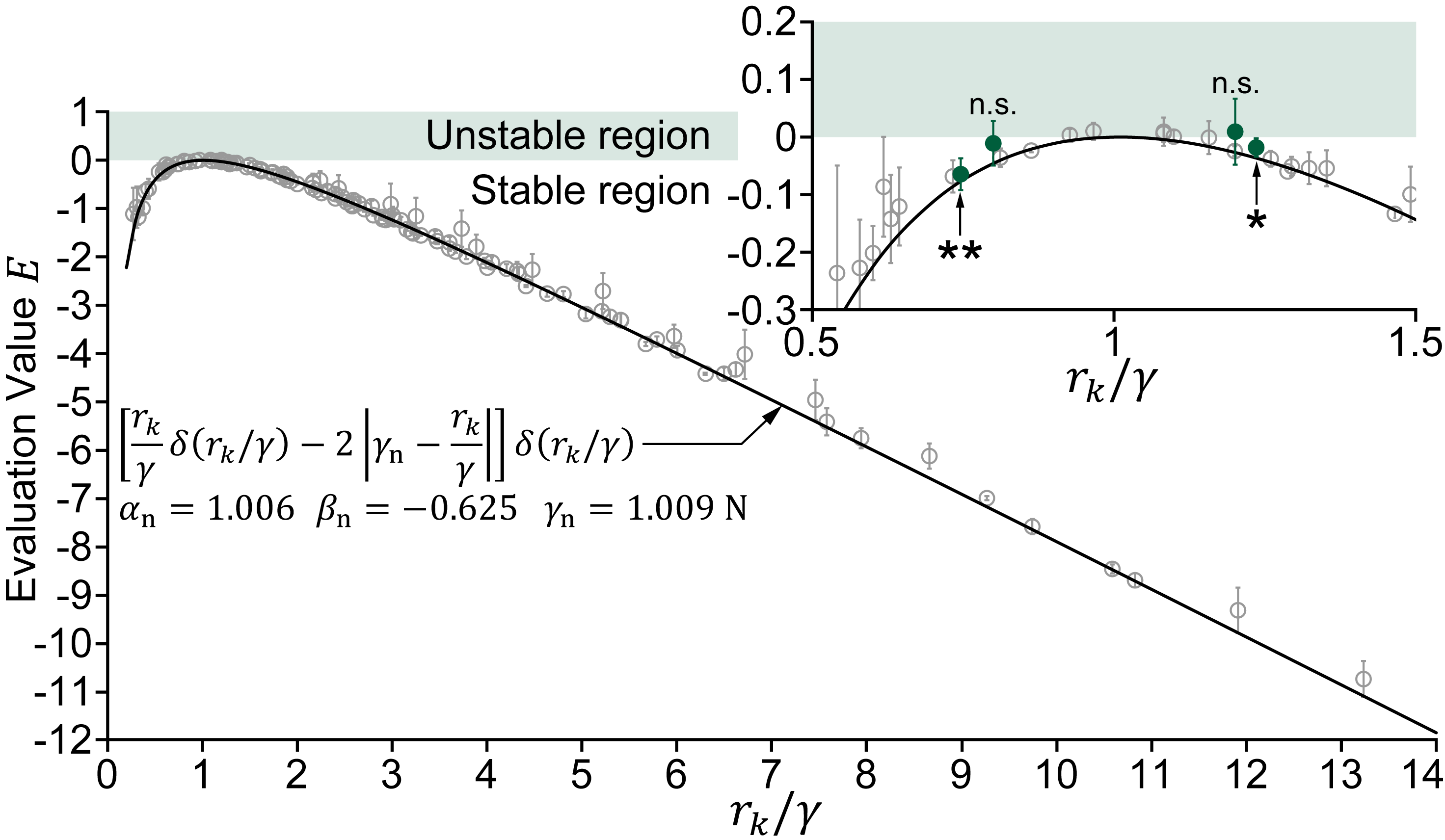
図3.力再現実験に基づく漸近安定判別.
これより,図1のインタラクションを実施した際,人間およびロボットの力$h_k$および$r_k$は陰的平衡点$\gamma$へ遠方において漸近収束し,近傍において発散することが予想される.
インタラクション実験
力再現実験へ参加した被験者へインタラクション実験を実施した結果,予想に一致し,図4のように陰的平衡点$\gamma$近傍へ収束していく様子が見られた.
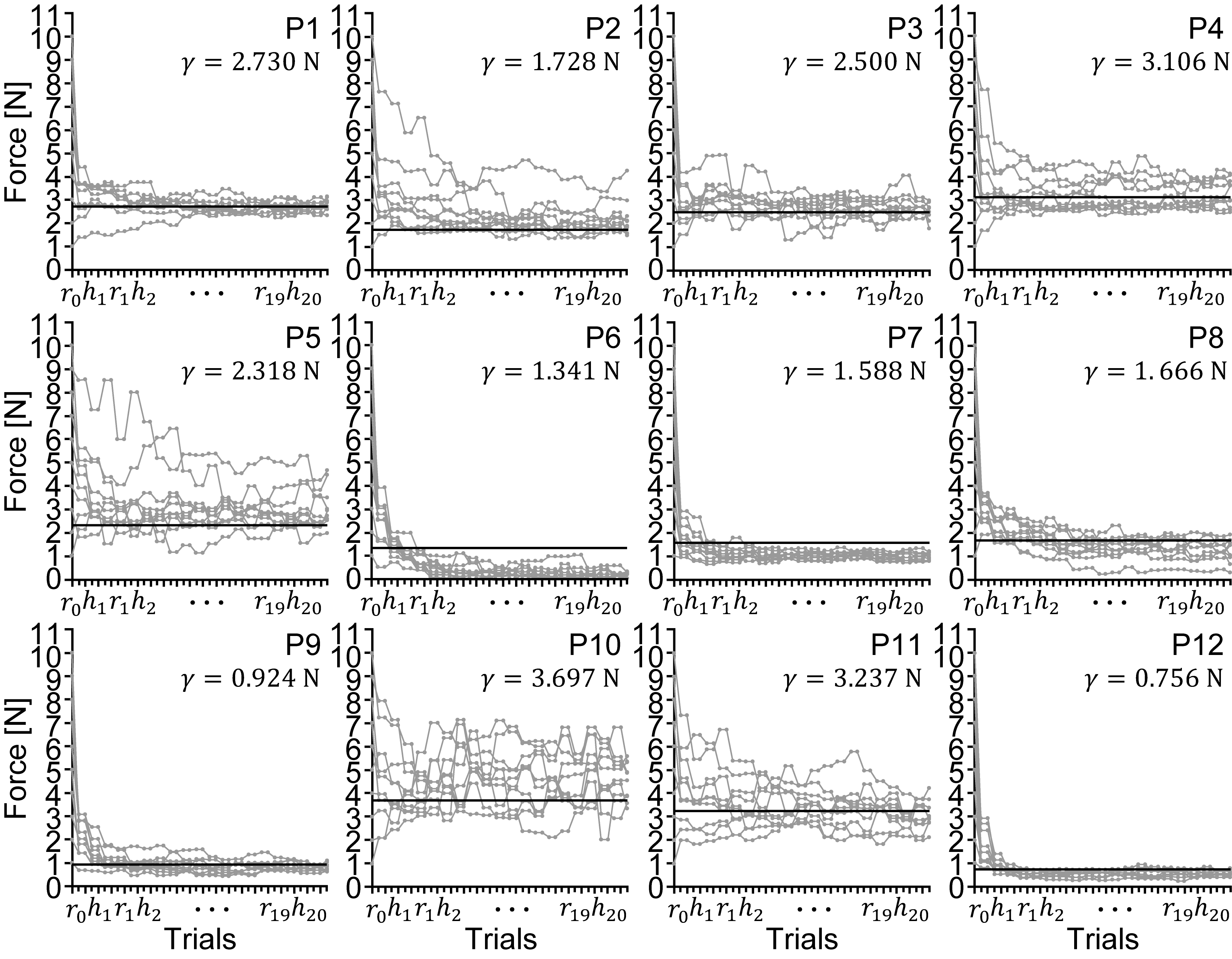
図4.インタラクション結果.
そして,その誤差絶対値(力と平衡点の差の絶対値をとったもの)は初期誤差が大きい場合は有意に減少し,図3に示す不安定領域に存在した場合は有意に増加し,領域境界付近において有意に変化が無い結果が得られた(図5).
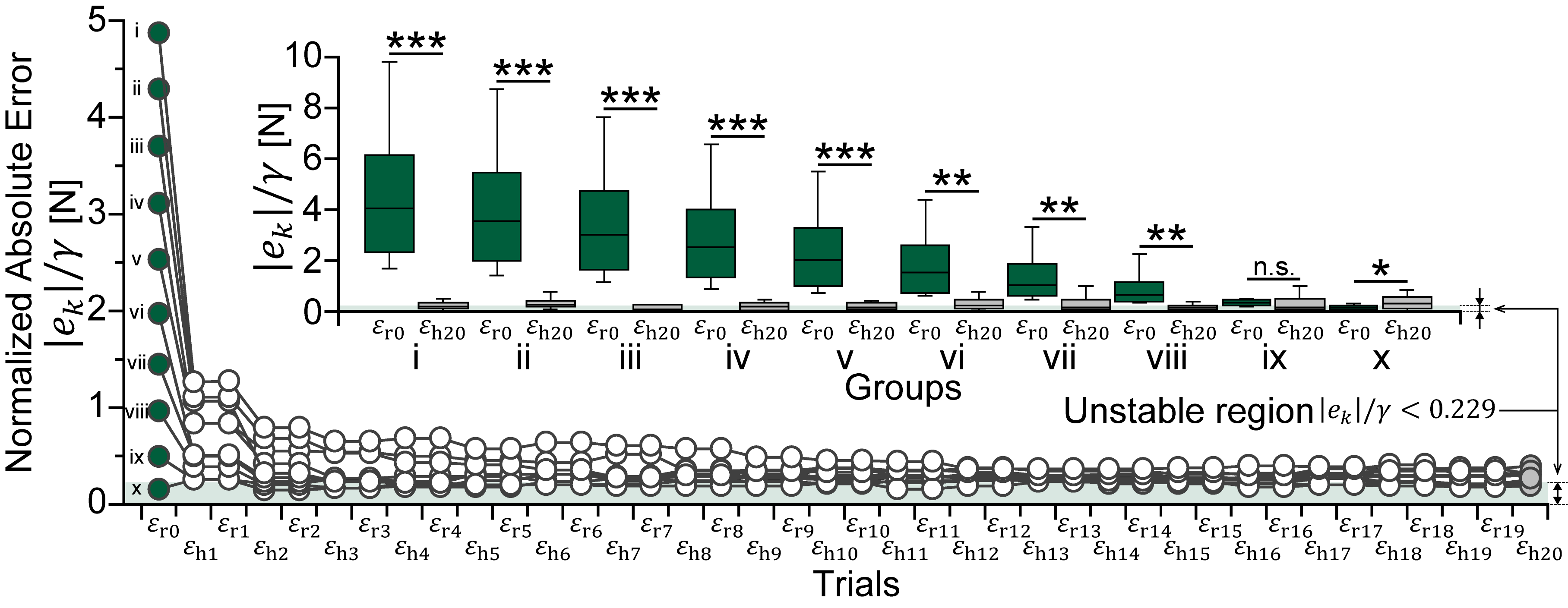
図5.誤差絶対値の収束結果.
まとめ
本研究は主観的に安定限界な離散事象インタラクション(図1)を対象に人間の力再現バイアスモデル(仮説1)およびインタラクションの漸近安定条件(仮説2)を提案した. 仮説および実験に基づき,人間は無意識的に陰的平衡点$\gamma$を生じ(図2),インタラクション中の力は陰的平衡点$\gamma$へと遠方において収束し,近傍において発散することで,陰的平衡点$\gamma$の周辺へ収束することを発見した(図4). 他にも,論文中[1]では手首や足を対象とした実験も実施しており,興味がある場合は論文を読まれたい.
参考文献
[1]
Hisayoshi Muramatsu, Yoshihiro Itaguchi, and Seiichiro Katsura,
“Involuntary Stabilization in Discrete-Event Physical Human-Robot Interaction,”
IEEE Transactions on Systems, Man, and Cybernetics: Systems, vol. 53, no. 1, pp. 576–587, Jan. 2023.
[IEEE Xplore],
[DOI: 10.1109/TSMC.2022.3184960],
[arXiv (Open Access)],
[Research Gate],
BibTex
@ARTICLE{MURAMATSU9816048,
author={Muramatsu, Hisayoshi and Itaguchi, Yoshihiro and Katsura, Seiichiro},
journal={IEEE Transactions on Systems, Man, and Cybernetics: Systems},
title={Involuntary Stabilization in Discrete-Event Physical Human–Robot Interaction},
year={2023},
volume={53},
number={1},
pages={576-587},
month = {Jan.},
doi={10.1109/TSMC.2022.3184960}}概要紹介
人間とロボットのインタラクションにおいて,無意識的な人間の動作がインタラクションを”あるていど”収束させることを示した.より具体的には,人間とロボットの離散事象力再現インタラクションにおいて,人間の無意識的な力再現バイアスが主観的に安定限界なインタラクションへ陰的平衡点を生じさせ,遠方において平衡点は漸近安定となり,近傍において不安定となることを力再現モデルおよび行動実験に基づき示した.仮説として,本論文は「1. 人間の力再現バイアスモデル」および「2. 陰的平衡点の漸近安定条件」を提案した.